Session pratique
Durée2h30Présentation & objectifs
Dans cette session, vous allez concevoir un système robuste d’analyse de données issues d’un capteur de température. Votre application ne doit jamais s’arrêter sur une erreur, même en cas :
- de données corrompues,
- de valeurs aberrantes,
- de panne du capteur.
Il vous faudra donc gérer les situations imprévues et les erreurs d’exécution du programme pour assurer la continuité du service.
De plus, votre application doit pouvoir être facilement étendue avec d’autres fonctionnalités.
Pour répondre à ces exigences, vous veillerez à :
- appliquer les principes de la programmation défensive,
- tester les fonctionnalités de votre code,
- documenter et commenter votre code pour faciliter son utilisation et sa complétion,
- respecter les conventions de codage pour partager du code de qualité.
Important
Le but de cette session est de vous aider à maîtriser des notions importantes en informatique. Un assistant de programmation intelligent tel que GitHub Copilot, que vous avez peut-être déjà installé, sera capable de vous fournir une solution à ces exercices basée uniquement sur un nom de fichier judicieusement choisi.
Dans un but d’entraînement, nous vous conseillons de désactiver ces outils en premier.
À la fin de l’activité pratique, nous suggérons que vous travailliez sur l’exercice à nouveau avec ces outils activés. Suivre ces deux étapes améliorera vos compétences à la fois fondamentalement et pratiquement.
Organisation et préparation de l’activité pratique
Vous allez réaliser cette activité à deux (et maximum un trinôme dans le groupe si nécessaire). Les développeurs étant désignés dans le reste du document en tant qu’étudiant1 et étudiant2.
L’activité est découpée en deux parties donnant lieu à deux programmes ; un capteur de données numériques qui écrit les données dans un fichier et un lecteur/analyseur des données produites par le capteur.
Environnement collaboratif
À deux, commencez par faire un fork du dépôt prog_session2_sensor en tant qu’étudiant1 sur gitlab-df.imt-atlantique.fr. Ajoutez ensuite étudiant2 pour qu’il y ait également accès en tant que developer.
En cas de travail en trinôme, deux étudiants collaborent sur l’écriture du même programme.
Le dépôt cloné a la structure de fichiers suivante :
README.mdà compléter avec une description au format markdown du programme et de la composition de l’équipe de développeurs,- un répertoire
srcavec deux sous-répertoiressensoretreader. Ces répertoires contiennent des fichiers de tests unitaires nommés respectivementtests_sensor.py,tests_reader.pyettests_analyzer.py, - un répertoire
docavec deux sous-répertoiressensoretreader.
Versionnez fréquemment votre code avec des messages de commit explicites.
Détails
Vous trouverez aussi un fichier .gitignore dans le répertoire racine du dépôt cloné et un fichier .gitkeep par répertoire. Le premier est un fichier de configuration de Git pour indiquer les fichiers et répertoires à ignorer lors d’un commit. Le deuxième force Git à versionner les répertoires vides, sans fichiers (par défaut, un répertoire vide n’est pas versionné par Git).
Aides techniques en Python
Lecture/écriture dans un fichier
Pour manipuler un fichier de votre système depuis votre code Python, il faut disposer d’un lien vers le fichier, lien que l’on appelle un descripteur et qui est de type TextIOWrapper.
L’obtention d’un descripteur s’effectue à l’aide de la fonction open. Lorsque le fichier n’est plus utilisé, le descripteur doit être libéré en fermant le fichier avec la méthode close, ce qui permet également de s’assurer que toutes les données ont bien été écrites sur le fichier avant la fin du programme.
Il est cependant conseillé, pour ne pas oublier de fermer le lien ouvert vers le fichier, d’encapsuler l’utilisation du fichier par un bloc d’instruction with comme illustré ci-dessous :
À la fin du bloc with le descripteur file est automatiquement fermé.
L’argument r passé à la méthode open indique que le fichier est ouvert en mode lecture.
Il peut être remplacé par w pour ouvrir le fichier en mode écriture, a pour ouvrir le fichier en mode ajout.
Bien que cette solution ne soit pas optimale, vous allez pour le moment ouvrir un lien vers le fichier à chaque tentative d’écriture ou de lecture.
Temporisation
L’écriture des températures relevées par le programme sensor dans le fichier data.txt ainsi que la lecture de ces données par le programme reader s’effectuent selon une certaine fréquence en secondes. Pour mettre en pause un programme x secondes, vous pouvez utiliser la fonction sleep du module time.
Pseudo-aléatoire
Vous aurez besoin de simuler de l’aléatoire à l’aide du module random. Voici ci-dessous des exemples pratiques pour retourner pseudo-aléatoirement une valeur de la liste passée en paramètre ou une valeur suivant une distribution gaussienne :
Gestion des logs
La classe Analyzer va générer des logs avec les statistiques calculées. Un moyen de générer ces messages est d’utiliser le module logging de python. Le code ci-dessous montre comment générer des logs sur la sortie standard :
Lorsqu’un niveau de log est défini, tous les messages de log de ce niveau et de niveaux supérieurs (i.e., plus sévères) seront publiés.
Il existe plusieurs niveaux de log, chacun ayant un degré de sévérité différent. Les niveaux de log standard sont, par ordre croissant de sévérité : NOTSET, DEBUG, INFO, WARNING, ERROR et CRITICAL.
Un capteur et un lecteur
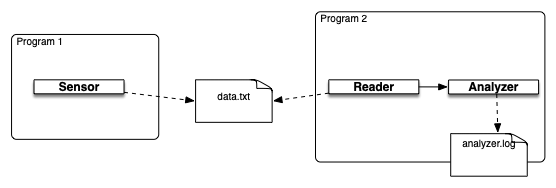
Le schéma ci-dessous illustre la structure du système logiciel à développer. Il est constitué de trois modules Python. Le premier définit une classe Sensor qui génère des valeurs numériques (des mesures de température d’un moteur à explosion par exemple), les mesures étant écrites dans un fichier (nommé data.txt par défaut). Le deuxième module définit une classe Reader qui lit les données du fichier et les envoie au troisième module qui analyse ces données et en fait des traces dans un fichier de log (nommé analyzer.log par défaut).
Chaque programme est décrit par un cahier des charges fonctionnelles associé à un ensemble de tests automatiques que vous allez utiliser pour vérifier son bon fonctionnement.
Au cours de cette première partie, l'étudiant1 travaille sur le programme 1 et l'étudiant2 sur le programme 2.
Les deux programmes doivent répondre à certaines exigences :
- valider les tests unitaires fournis,
- disposer d’une documentation en anglais générée par l’outil
pydocà partir des docstrings présentes dans le code, - contenir du code satisfaisant au maximum la PEP8 et comportant des commentaires utiles.
Programme 1: la classe Sensor (étudiant1)
Le développement du programme 1 s’effectue par étape.
Étape 1 : La classe Sensor et ses attributs
Implémentez une classe nommée Sensor (dans un fichier de chemin src/sensor/sensor.py) qui simule le comportement d’un capteur de données :
- qui capte des valeurs selon une loi Gaussienne donnée par sa moyenne et sa déviation standard,
- qui tombe en panne toutes les 10 captations de données en moyenne.
Toute instance de cette classe possède les attributs suivants :
Le constructeur de la classe permet de spécifier les valeurs de chacun de ces attributs ou de leur affecter les valeurs par défaut suivantes :
Chaque attribut doit être accessible via une méthode de type accesseur (getter) dont les prototypes sont les suivants :
Une fois le constructeur et les accesseurs définis, exécutez les tests associés avec les commandes suivantes (à exécuter depuis le répertoire src/sensor) :
python tests_sensor.py TestSensor.test_encapsulation_default_values
python tests_sensor.py TestSensor.test_encapsulation_custom_values
Correction
Étape 2 : Fonctionnalités du capteur
Vous allez désormais implémenter les fonctionnalités du capteur qui sont les suivantes :
-
Génération d’une donnée selon une loi gaussienne paramétrée par les attributs
__meanet__std. Le prototype de la méthode est donné ci-dessous :La valeur générée par la méthode
get_value(self)doit être comprise entre 0 et 150 ou une exception de typeOutofBoundsException(classe d’exception existante dans le fichiersensor.py). Une captation sur 10 en moyenne, une panne est simulée et le capteur retourne une exception de typeNotRespondingException(classe d’exception présente danssensor.py). Cette méthode doit être testée à l’aide du test suivant :python tests_sensor.py TestSensor.test_get_value -
Mise en place du capteur. La méthode
runsimule la captation de données et leur stockage dans le fichier__storage_file_name. Le prototype de la méthode est donné ci-dessous :La méthode implémente une boucle infinie dans laquelle :
- le descripteur du fichier utilisé pour le stockage de données est ouvert en écriture
- au premier pas de la boucle, le capteur ajoute quatre lignes commençant par
#ayant la forme suivante :
où
<ID>est l’ID du capteur,<TIME>le temps d’attente entre 2 données produites et<FILE_NAME>le nom du fichier où les données sont stockées- une valeur est générée
- une écriture dans le fichier est produite qui est soit la valeur générée, soit
OoBen cas d’exceptionOutofBoundsException, soitNRen cas d’exceptionNotRespondingException.
En outre, trois types d’exception doivent être gérées par cette méthode :
KeyboardInterruptpour arrêter l’exécution avec unCtrl-Cpar exemple,IOErroren cas d’impossibilité d’ouvrir ou d’écrire dans le fichier de données etExceptionpour toute autre exception.Veillez à ouvrir un nouveau descripteur vers le fichier à chaque tour de boucle. Ce n’est pas idéal, mais simple. Si le temps le permet, vous verrez en complément comment faire communiquer des programmes de manière plus habile.
Une fois la classe implémentée, exécutez tous les tests unitaires fournis avec la commande suivante (ou directement depuis VSCode) :
python tests_sensor.py
Correction
Étape 3 : Vers un code plus exploitable
Avant de partager votre code, effectuez les vérifications suivantes :
- votre code respecte au maximum les conventions de codage de la PEP8. Pour ce faire, appliquez la commande suivante et tentez de vous rapprocher d’un score de 10/10 :
pylint sensor.py - ajoutez des commentaires à votre code pour rendre son déroulement plus explicite
- ajoutez des documentations (sous forme de docstring) au module, aux classes et à leurs méthodes. Puis, générez une documentation à l’aide de la commande suivante :
pydoc -w sensoret déplacez la documentation dans le répertoiredoc/sensor/.
Une fois votre code complété, pushez vos modifications sur votre dépôt dans gitlab-df.imt-atlantique.fr.
Passez à la partie Evaluation par les pairs ou aidez votre binôme à développer son programme.
Programme 2 (étudiant2)
Le développement du programme 2 s’effectue par étapes avec le développement de deux classes.
Étape 1 : La classe Analyzer et ses attributs
Implémentez une classe nommée Analyzer (dans un fichier de chemin src/reader/analyzer.py). Cette classe analyse les __buffer_size dernières données générées par un capteur de données et trace le résultat dans un fichier de log.
Toute instance de cette classe possède les attributs suivants :
Le constructeur de la classe permet de spécifier le nombre de données à traiter lors de chaque analyse (__buffer_size avec comme valeur par défaut 10) et le nom du fichier recevant les logs (__log_file initialisé par défaut à analyzer.log). La configuration du gestionnaire de logs ainsi que l’initialisation des autres attributs sont réalisées comme suit :
Certains attributs doivent être accessibles via une méthode de type accesseur (getter) dont les prototypes sont les suivants :
Les autres attributs n’ont pas de raison d’être accessibles depuis l’extérieur de la classe. Dans un autre langage de programmation, on les aurait déclarées comme privées.
Une fois le constructeur et les accesseurs définis, exécutez les tests associés avec les commandes suivantes (à exécuter depuis le répertoire src/reader) :
python tests_analyzer.py TestAnalyzer.test_encapsulation_default_values
python tests_analyzer.py TestAnalyzer.test_encapsulation_custom_values
Correction
Étape 2 : Fonctionnalités de la classe Analyzer
Vous allez désormais implémenter les fonctionnalités d’analyse (très simples) de valeurs. Il y en a deux :
- ajout d’une donnée dans le fichier de log. Si c’est une valeur pouvant être convertie en réel, elle est ajoutée dans la liste
__valueset le messageAdded value:<VALUE>où<VALUE>est la valeur ajoutée dans le fichier de log (comme un message de débogage). Sinon la valeur est ajoutée dans la liste__errorset le messageError adding value:<VALUE>où<VALUE>est la valeur ajoutée dans le fichier de log (comme une erreur). Cette méthode déclenche également l’analyse (voir méthode suivante) dès queself.__buffer_sizenouvelles valeurs ont été enregistrées dans__values. Le prototype de cette méthode est le suivant : - génération du résultat de l’analyse à savoir la moyenne, le minimum et le maximum des
self.__buffer_sizedernières valeurs générées par le capteur (et présentes dans la liste__values).
Une fois la classe implémentée, vous pouvez exécuter tous les tests unitaires avec la commande suivante ou directement depuis VSCode:
python tests_analyzer.py
Correction
Étape 3 : Vers un code plus exploitable
Avant de partager votre code, effectuez les vérifications suivantes :
- votre code respecte au maximum les conventions de codage de la PEP8, pour se faire, appliquer la commande suivante et tentez de vous rapprocher d’un score de 10/10 :
pylint analyzer.py - ajoutez des commentaires à votre code pour rendre son déroulement plus explicite
- ajoutez des documentations (sous forme de docstring) au module, la classe et ses méthodes. Puis, générez une documentation à l’aide de la commande suivante :
pydoc -w analyzeret déplacez la documentation dans le répertoiredoc/reader/.
Étape 4 : La classe Reader et ses attributs
Implémentez une classe nommée Reader (dans un fichier de chemin src/reader/reader.py). Elle lit les données produites par le capteur et stockées dans un fichier et les envoie à l’Analyzer pour analyse.
Toute instance de cette classe possède les attributs suivants :
Le constructeur de la classe permet de spécifier l’instance d’analyseur associé, le temps d’attente entre 2 lectures (__sleep_time avec comme valeur par défaut 1.0) et le chemin du fichier dans lequel lire (__file_name avec comme valeur par défaut ../data.txt).
Tous les attributs doivent être accessibles via une méthode de type accesseur (getter) dont les prototypes sont les suivants :
Une fois le constructeur et les accesseurs définis, exécutez les tests associés avec les commandes suivantes (à exécuter depuis le répertoire src/reader) :
python tests_reader.py TestReader.test_encapsulation_default_values
python tests_reader.py TestReader.test_encapsulation_custom_values
Correction
Étape 5 : Fonctionnalités de la classe Reader
Vous allez désormais implémenter les deux fonctionnalités de la classe Reader:
-
une méthode prenant en paramètre une ligne lue depuis le fichier des données. Les lignes commençant par un
#sont ignorées, les autres sont envoyées à l’analyseur. Le prototype de cette fonction est le suivant : -
une méthode principale qui met en place la lecture continue sur le fichier de données. Après l’ouverture du fichier de données en lecture, la méthode entre dans une boucle infinie et tente de lire une ligne. S’il y en a une, elle la traite avec la méthode précédente, sinon le programme est mis en pause pendant une durée de
self.__sleep_timesecondes. Le prototype de cette fonction est le suivant :Plusieurs types d’exception doivent être gérées séparément dans cette méthode
run:KeyboardInterruptpour arrêter avec unCtrl-Cpar exemple,FileNotFoundErrorlorsque le fichier de données n’existe pas,IOErrorpour une erreur de lecture du fichier,Exceptionpour tout autre raison d’échec.
Le premier type d’exception entraîne la fin du programme. Pour les autres, un message d’erreur est affiché, puis la méthode
runest exécutée de nouveau après un temps de pause correspondant à deux fois le temps d’attente.
Une fois la classe implémentée, vous pouvez exécuter tous les tests unitaires avec la commande suivante ou bien directement depuis VSCode :
python tests_reader.py
Correction
Étape 6 : Vers un code plus exploitable
Avant de partager votre code, effectuez les vérifications suivantes :
- votre code respecte au maximum les conventions de codage de la PEP8, pour se faire, appliquer la commande suivante et tentez de vous rapprocher d’un score de 10/10 :
pylint reader.py - ajoutez des commentaires à votre code pour rendre son déroulement plus explicite
- ajoutez des documentations (sous forme de docstring) au module, la classe et ses méthodes. Puis, générez une documentation à l’aide de la commande suivante :
pydoc -w readeret déplacez la documentation dans le répertoiredoc/reader/.
Evaluation par les pairs
Vous avez développé les deux programmes en parallèle. Maintenant, chaque étudiant doit récupérer sur sa machine la dernière version du code poussé sur le dépôt Git.
Retour qualitatif
Chaque étudiant va désormais analyser le livrable de son binôme et le questionner sur ses choix en matière de :
- programmation défensive (Toutes les erreurs d’exécution possibles ont-elles été gérées ? La gestion de ces erreurs d’exécution est-elle conforme au cahier des charges ? etc.),
- commentaires et documentation (Les commentaires et la documentation sont-ils d’un niveau de détail suffisant pour comprendre le code sans avoir à l’analyser ?)
- qualité du code (Les conventions de codage ont-elles été respectées ?).
Test
Chaque étudiant va exécuter le code du capteur sensor.py et le code du lecteur reader.py dans un terminal dédié. Pour ce faire, ajouter le code suivant dans le fichier reader.py :
et le code suivant dans le fichier sensor.py :
Logiquement, vous devez pouvoir exécuter ces deux programmes dans n’importe quel ordre. Le capteur doit pouvoir être arrêté et ré-exécuté sans que le lecteur ne s’arrête.
Si vous n’arrivez pas à atteindre ce niveau de fonctionnalité, analysez à deux le code pour effectuer les corrections nécessaires. Profitez-en pour discuter avec votre collaborateur de ses choix d’implémentation.
Pour aller plus loin
Plusieurs capteurs et un analyseur
L’objectif de cette seconde partie est double :
- continuer à faire un retour à votre collaborateur sur la qualité de son livrable,
- compléter les fonctionnalités de l’application en gérant plusieurs types de capteurs et un système d’analyse par capteur.
Pour cette seconde partie, vous allez inverser les rôles. étudiant2 va compléter le programme 1 sur les capteurs et étudiant1 va compléter le programme 2 sur les analyseurs.
Lors de ce travail d’implémentation, discutez avec votre collaborateur :
- des éventuels manques ou imprécisions dans la documentation et les commentaires,
- des choix d’implémentation ou de nommage que vous désapprouvez.
Vous pouvez invoquer
pylintsur le code de votre collaborateur pour identifier puis discuter des violations de la PEP8.
Complétion du programme 1 (étudiant2)
Définissez un second type de capteur, dont l’objectif est d’effectuer un test de bon fonctionnement. Ce capteur retourne un booléen au lieu d’un réel.
Un capteur a donc une propriété supplémentaire qui indique son type : binary ou continue.
Étant donné que plusieurs capteurs écriront dans un même fichier, chaque écriture sera préfixée par le nom du capteur et son type. Considérons deux capteurs nommés sensor1 de type binaire et sensor2 de type continu, on pourra alors trouver dans le fichier de données les captations suivantes :
Commentez, documentez et validez la conformité de votre code vis-à-vis de la PEP8. Les tests unitaires de la partie 1 ne sont cependant pas adaptés à cette nouvelle version du code, il est donc inutile de tester votre code. Mais patience, dès la session prochaine, vous apprendrez à concevoir des tests unitaires. N’oubliez pas qu’un objectif de cette partie est de faire un retour à votre collaborateur, qui a développé la partie, sur la qualité de son livrable.
Complétion du programme 2 (étudiant1)
Pour le moment, le programme contient une instance de la classe Reader et une instance de la classe Analyzer.
Vous allez désormais modifier la classe Reader pour qu’elle soit associée à plusieurs analyseurs.
Vous allez mettre en place deux nouveaux types d’analyseurs :
- un analyseur de captations binaires dont l’analyse vise à quantifier le pourcentage de tests réussis,
- un analyseur d’erreurs qui calcule le nombre et le pourcentage d’erreurs de chaque type par capteur. L’analyse des erreurs n’est pas déclenchée selon une certaine fréquence, mais effectuée lorsque le programme
readerest arrêté.
Un analyseur doit désormais être associé à chaque capteur pour lequel une donnée est lue dans le fichier. Les analyseurs de valeurs (binaires ou continues) dirigent leurs analyses vers un même fichier, et l’analyseur d’erreur vers un fichier de log spécifique.
Mise en commun (étudiant1 et étudiant2)
Après avoir mis-à-jour le dépôt git sur le serveur gitlab, analysez la documentation et les messages de commit qui concernent les modifications effectuées par votre collaborateur sur son code afin de comprendre ses choix d’implémentation.
Échangez sur les modifications apportées au code par votre collaborateur pour prendre en compte les nouvelles fonctionnalités de la partie 2 et faites lui un retour sur la qualité de ce dernier livrable.
Puis, testez chacun l’exécution de plusieurs capteurs associés à un lecteur avec plusieurs analyseurs :
- définissez un programme par capteur (e.g.
run_sensor1.py,run_sensor2.py, etc.) et exécutez ces programmes dans des terminaux différents, - définissez un programme pour exécuter le lecteur.
Pour aller encore plus loin
Pour simuler l’indépendance des capteurs et du lecteur, vous avez exécuté les programmes depuis différents terminaux, chaque terminal étant isolé dans un processus système.
Depuis un même programme Python, il est possible d’exécuter différents morceaux de code indépendants les uns des autres en utilisant des threads. Des thread sont également appelés processus légers et peuvent être exécutés dans un même processus mais en parallèle. Utilisez la documentation pour expérimenter ce parallélisme.
Faire communiquer deux programmes sur une même machine, vous verrez comment le faire en réseau en S6, n’est pas une chose aisée. Le recours à un fichier partagé tel que nous l’avons fait n’est vraiment pas l’idéal. De nombreuses tentatives de lecture occupent inutilement des ressources de calcul. Une méthode plus appropriée est d’avoir recours aux techniques de communication entre processus (Inter Process Communication). Vous pouvez consulter la documentation des IPC en Python pour voir notamment comment des techniques d’envoi de signaux permettraient de synchroniser des lectures et des écritures.